
Going towards large-scale system level, data-driven computational models can be embedded in control systems to link the cellular-level phenomena to behavior. A spiking cerebellar network has been embedded in control systems of sensorimotor behaviour, specifically including multiple synaptic plasticity rules to generate learning. By minimizing the difference between the motor plan and the actual sensory state, the cerebellar network acquires knowledge about the body-environment interaction and predicts corrective signals. Thus, spiking cerebellar controllers are helping to reveal the cellular-level substrate of network learning and signal coding, opening new frontiers for predictive computing and autonomous learning in ICT, AI, and medical applications.
A PhD student involved in this research topic will have the opportunity to learn informatic programming and control systems in neuroscience, and to deal with encoding/decoding in sensorimotor behavior.
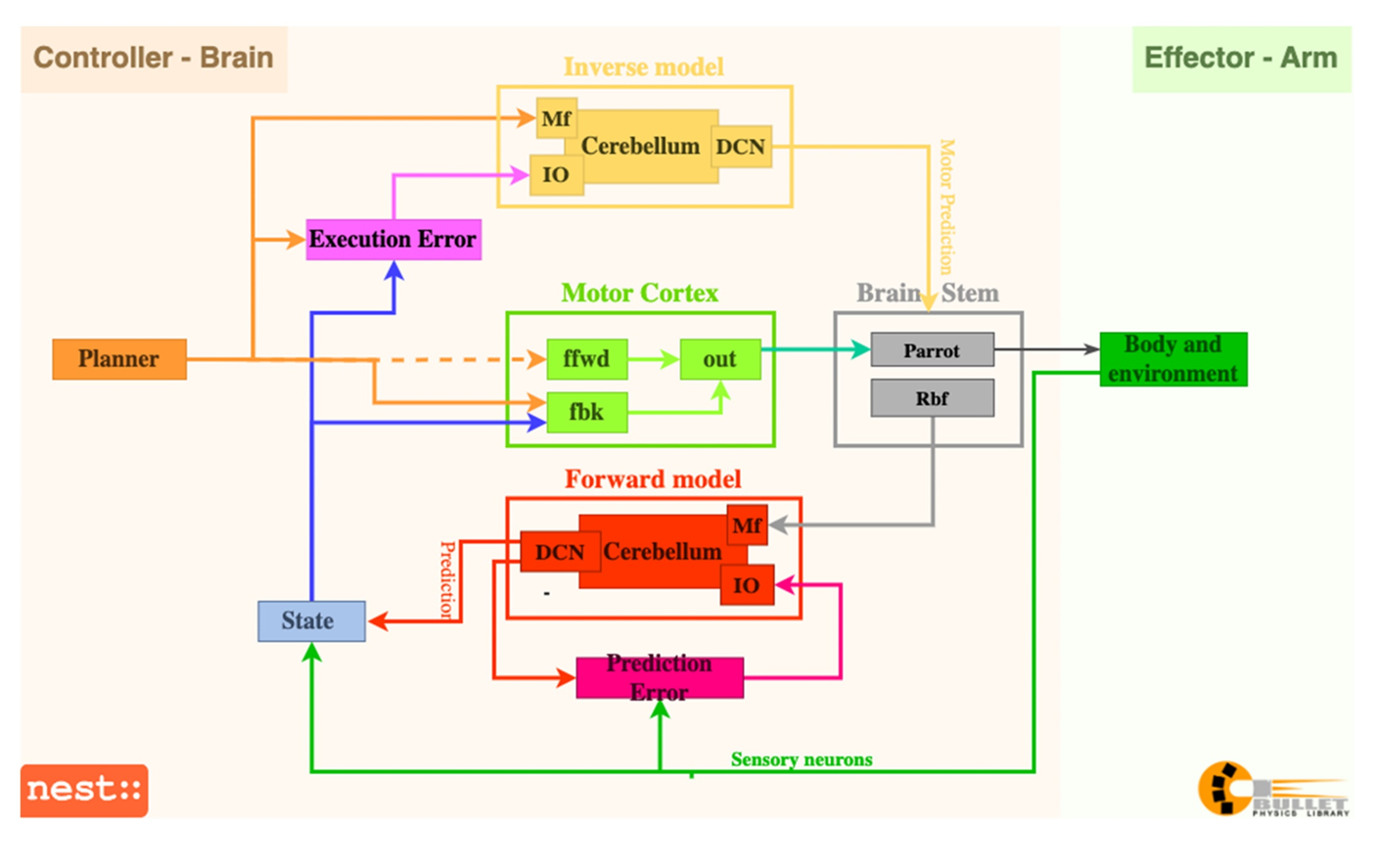
Control system with functional blocks represented as Spiking Neural Networks (SNN). Adaptive cerebellar models in forward and inverse configuration. Learning: errors by comparing sensory output and prediction (prediction error for the cerebellar forward model) and by comparing desired and actual motor plan (execution error for the cerebellar inverse model), via inferior olive (IO). Both models are endowed with advanced physiologically-inspired plasticity rules. Software: Network reconstruction and simulation via Python-based BSB (Brain Scaffold Builder) and NEST (SNN simulator). Behavioural testing: Simulation of an elbow flexion-extension sequence, interfacing the brain controller with a biomechanical system (e.g. Pybullet).
References
- Grillo M, Geminiani A, Alessandro C, D’Angelo E, Pedrocchi A and Casellato C. Bayesian Integration in a Spiking Neural System for Sensorimotor Control. NEURAL COMPUTATION 2022; doi: 10.1162/neco_a_01525
- Antonietti A, Geminiani A, Negri E, D’Angelo E, Casellato C and Pedrocchi A. Brain-Inspired Spiking Neural Network Controller for a Neurorobotic Whisker System. FRONT. NEUROROBOT 2022; doi: 10.3389/fnbot.2022.817948
- Bogdan PA, Marcinnò B, Casellato C, Casali S, Rowley A, Hopkins M, Leporati F, D’Angelo E, Rhodes O. Towards a bio-inspired real-time neuromorphic cerebellum, FRONT CELL NEUROSCI 2021; doi: 10.3389/fncel.2021.622870
- Antonietti A, Martina D, Casellato C, D’Angelo E, Pedrocchi A. Control of a humanoid NAO robot by an adaptive bioinspired cerebellar module in 3D motion tasks. INTELL. NEUROSCI. 2019; 4862157 doi:10.1155/2019/4862157
- Casellato C, Antonietti A, Garrido J.A, Ferrigno G, D’Angelo E, Pedrocchi A. Distributed cerebellar plasticity implements generalized multiple-scale memory components in real-robot sensorimotor tasks. COMPUT. NEUROSCI. 2015; 9; doi: 10.3389/fncom.2015.00024
- Casellato C, Antonietti A, Garrido J.A, Carrillo R.R, Luque N.R, Ros E, Pedrocchi A, D’Angelo E. Adaptive robotic control driven by a versatile spiking cerebellar network. PLoS One 2014; 9(11): e112265; doi:10.1371/journal.pone.0112265